Indholdsfortegnelse:
- Trin 1: Indsamling af komponenterne
- Trin 2: Lav labyrintbrættet
- Trin 3: Opsætning af kredsløbet
- Trin 4: Lav appen
- Trin 5: Skrivning af Arduino -koden
")
Video: Android + Arduino Labyrith -spil: 5 trin (med billeder)
")
2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:27



Hej fyre..
Har du nogensinde vandret for at lave et labyrintbræt, der kan styres fra din Android -smartphone….!
Godt du er på det rigtige sted. Jeg byggede en til mig selv ved hjælp af Arduino og android.
Bare rolig, det er let,.. I dette projekt viser jeg dig, hvordan du laver:
1. Labyrintbræt (jeg lavede det af gamle trækasser, der lå rundt).
2. Android -app i app -opfinder til styring af tavlen.
3. Skrivning af programmet i Arduino til kontrol af bestyrelsen og
4. Opsætning af kredsløbet….
Du kan senere bruge konceptet lært i andre projekter, som du vil bygge..
Så lad os starte uden at spilde mere tid ….!
Trin 1: Indsamling af komponenterne



Til dette projekt skal du bruge følgende elementer:
1. To servomotorer (jeg brugte mini -motorer, og de fungerede for mig).
2. Arduino Uno. (Jeg foreslår at købe det fra snapdeal, det er en klon, men er værd at hver krone, jeg har brugt)
3. Et Bluetooth -modul.
4. Et brødbræt.
5. Nogle springtråde
6. Tynde træ- eller hårde brædder
7. søm, nogle nøglestænger fra gamle tastaturer
8. Thermocol (polystyren)
Trin 2: Lav labyrintbrættet



Dette er den mekaniske del af projektet..
Først til basen tager du et langt rektangel stykke træplank eller pap. det skal være større end det egentlige vippebræt..
Skær to små lige store kubiske træstykker..
og tilføj et søm til hver på en sådan måde, at de er aline i samme højde fra basen. Skær også noget ekstra stykke træ for at tilføje som en støtte til søjlerne..
nu til det øverste bord..
lav en ramme mindre end basen, dette vil være vores x -akse, ved ydersiden af de mindre kanter af rammen lav små huller nøjagtigt i midten af kanterne. skær stængerne i halve og klæb dem til de store kanter af rammen, der vender indad. skær dem i halve, inden du gør det.
dette holder det øverste bræt til rammen og hjælper med rotation.
tilføj nu søjlerne til de ydre huller for at få rammen til at stå på bunden.
klæb søjlerne til bunden, og fastgør også understøtningerne til dem.
nu for at tilføje servomotorer.
den ene vil blive fastgjort til basen og vil blive fastgjort til rammen ved hjælp af en lille stang til at rotere rammen
en anden vil blive fastgjort til rammen og vil blive fastgjort til det øverste bord ved hjælp af en lille stang til at rotere det øverste bord.
servoerne skal monteres vinkelret på hinanden som vist på billederne.
nu er bestyrelsen klar.
jeg lavede labyrinten ved hjælp af termokolade og et kortbræt.
Trin 3: Opsætning af kredsløbet

Opsæt kredsløbet som vist på billedet …
Husk for servoer jeg bruger den røde ledning er positiv, brun er negativ og orange er signal.
Bluetooth -modul
Rx går til pin 1
Tx går til pin 0
Signaltråd på basisservo går til pin 5
Signaltråd af rammeservo går til pin 6
Husk at tilføje ekstra strømforsyning til servo- og bluetooth -modulet. Andet klogt modul får ikke nok strøm og bliver ved med at afbryde forbindelsen, der viser fejl 516. Jeg havde mange problemer med at fejlfinde det og endelig finde ud af problemet og løsningen.
Trin 4: Lav appen


Okay først og fremmest skal du logge ind på mit app inventor for at lave apps..
gå til
og klik på Opret app! som i øverste højre hjørne, tilmelder dig, og du er klar til at gå ….
Alt andet har jeg vist i videoen.. kig.
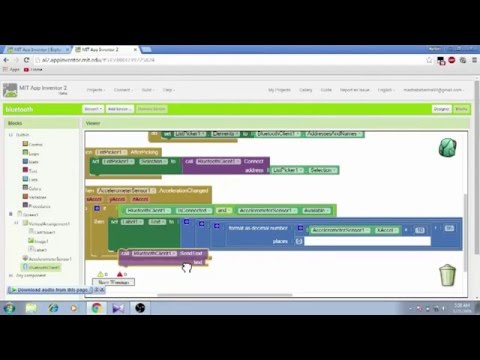
her det grundlæggende:
når skærmen initialiseres i appen (hvilket i dette tilfælde er skærm1), -accelerometeret Sensor er aktiveret, og følsomheden er indstillet til maks. dvs. 3.
nu når vi trykker på listevælgeren
-en liste dukker op, der viser de parrede enheder.
(du skal parre modulet, før du åbner appen, som normalt er parkoden 1234)
Nu, før du vælger listevælgeren, -indstil listen med de parrede enheder og deres adresser
Når du har valgt enheden
-blåtanneadapteren opretter forbindelse til den valgte enhed
Nu er modulet forbundet
Nu når acclerometerSensor data ændres
-Føj dataene til etiketteksten, og send dem med bluetooth -sendingen.
Nu er den vanskelige del at sende de to data ad gangen
# acclerometer -data varierer fra 0 til 9,5, når den vippes til venstre og 0 til -9,5, når den vippes til højre, det samme gælder, når telefonen vippes under og op ad afdelinger..
så vi har x- og y -aksens vippedata, som vi skal sende …
lad dataene for x -aksen være X og y -aksen være Y
så det jeg gjorde er dette:
Tekst = "(X*10 (fjern decimaltegn efter det) +95)*1000 (gang med 1000)+Y*10 (fjern decimaltegn) +95"
så nu spænder dataene fra 0 til 190 for hver akse og tilføjes til 190180, hvor de første 3 cifre er x -aksen og de sidste 3 er y -aksekoordinater …
som vil blive sendt til bluetooth -modulet og vil blive nedbrudt til de faktiske datasæt og kort med servoens rotationsvinkler i arduino -kode …
Trin 5: Skrivning af Arduino -koden


Når appen er færdig, kan vi starte med koden, jeg har uploadet koden, download den, kompilér og send den til arduinoen, men vent, før du sender koden, fjern rx- og tx -stifterne fra bluettoh -modulet fra arduino -kortet.. og send koden efter dette kan du fastgøre stifterne tilbage..
koden, der modtages fra bluetooth, er en streng, der har vores aksedata.
nu Serial.parseInt (); bruges til at læse strengen og konvertere strengen til int i en variabel pos.
nu har pos værdi = 190180 (sig) vores mål er nu at dekryptere dataene, dvs. fjerne x -aksen og y -koordinater
for x -aksen. divider værdien med 1000, dette giver 190.i.e værdi/1000 = 190
og for y -aksen modulær dividerer værdien med 1000, hvilket vil give os 180 dvs. værdi%1000 = 180
beregn nu maks og min position for de servoer, du vil have til at vippe brættet, … i mit tilfælde er det 180 og 75 og….
nu har vi koordineret x- og y -aksen, nu er vi bare nødt til at kortlægge koordinaterne med de min og max rotationsvinkler, som vi ønsker for vores servoer….
se koden for detaljer.
Og vi er færdige … upload koden, åbn appen, og spil….
Ved du, at google har lavet en til sig selv og er en meget stor labyrint, du nogensinde har set … som også er min motivation for at bygge en til mig selv.
Så god fornøjelse til næste gang..
Anbefalede:
Arduino Halloween Edition - Pop -out -skærm med zombier (trin med billeder): 6 trin
: 6 trin")
Arduino Halloween Edition - Zombies Pop -out -skærm (trin med billeder): Vil du skræmme dine venner og lave skrigende støj i Halloween? Eller vil du bare lave en god sjov? Denne pop-out-skærm fra Zombies kan gøre det! I denne Instructable vil jeg lære dig, hvordan du nemt laver jump-out zombier ved hjælp af Arduino. HC-SR0
Programmer din Arduino med en Android -enhed over Bluetooth: 6 trin (med billeder)
")
Programmer din Arduino med en Android -enhed over Bluetooth: Hej verden, i denne instruktør vil jeg vise dig, hvordan du programmerer din Arduino Uno med din Android -enhed via Bluetooth. Det er meget enkelt og så billigt. Det giver os også mulighed for at programmere vores Arduino, hvor vi end ønsker det over trådløs bluetooth … Så
Tilpasselig Laser Maze Med Arduino og Android App: 13 trin (med billeder)
")
Tilpasselig Laser Maze Med Arduino og Android App: Se masser af labyrint fra børnebøger til automatisk labyrintløsningsrobot. Her prøver jeg nogle ting anderledes, hvor jeg løser en labyrint ved hjælp af laserreflektion. Når jeg ved starten synes jeg det er meget let, men gør det billigt, koster det mere tid til nøjagtighed. Hvis nogen vil
Realtime MPU-6050/A0 datalogning med Arduino og Android: 7 trin (med billeder)
")
Realtime MPU-6050/A0 datalogning med Arduino og Android: Jeg har været interesseret i at bruge Arduino til maskinlæring. Som et første trin vil jeg bygge en realtime (eller temmelig tæt på det) datavisning og logger med en Android -enhed. Jeg vil fange accelerometerdata fra MPU-6050, så jeg designer
RC bilhack med Android og Arduino: 6 trin (med billeder)
")
RC Car Hack Med Android og Arduino: I denne vejledning får vi din almindelige gamle RC til at blive styret af Android og give den nogle ekstra funktioner Denne tutorial har to unikke ting fra andre bilhacks derude. Vi installerer en servo for jævn styring af hjulene2. Vi er