Indholdsfortegnelse:
- Trin 1: Deleliste
- Trin 2: Download og flash skitserne
- Trin 3: Tilslut modtageren til Flight Controller og Setup Cleanflight
- Trin 4: Nogle flere oplysninger

Video: Long Range Wifi PPM / MSP: 5 trin

2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:28

For noget tid siden postede jeg min Wifi PPM controller. Det fungerer ret godt. Bare rækkevidden er lidt kort. Jeg fandt en løsning på dette problem. ESP8266 understøtter en tilstand kaldet ESPNOW. Denne tilstand er meget mere lavt niveau. Det mister ikke forbindelsen så let, og hvis den mister forbindelsen, tilsluttes den igen med det samme.
Jeg bruger tre ESP8266. Den ene er ESPNOW -modtageren, den anden er ESPNOW -afsenderen, og den tredje er det adgangspunkt, som du kan oprette forbindelse til. Den tredje er nødvendig, fordi ESPNOW -afsenderen ikke kan være et adgangspunkt på samme tid. Jeg tilføjede også nogle antenner for at få bedre rækkevidde.
Der er et andet adgangspunkt direkte ved modtageren. Hvis du opretter forbindelse til dette, har du det samme som med det gamle WifiPPM -projekt.
Jeg tilføjede også support til MSP -protokolmodtager. Dette er "MultiWii Serial Protocol", som understøttes af MultiWii, Betaflight, Cleanflight og mange andre flyvekontrollere.
Trin 1: Deleliste




Du skal bruge tre ESP8266 -moduler af enhver art. Men du vil have den bedste rækkevidde. Så jeg foreslår at bruge ESP8266 moduler med antenner. Det fungerer også uden antenner. Jeg bruger følgende dele:
2 x ESP07 (ESP8266 -modul med antennestik)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX på modtagersiden
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / han + I-PEX Adapter på afsenderside
3, 3 V strømforsyning til alle ESP8266 moduler
Du har også brug for en pc med Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 support til Arduino IDE. Følg disse instruktioner: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket-bibliotek til Arduino:
Trin 2: Download og flash skitserne



Du kan downloade skitserne her.
Pak filen ud. Der er tre mapper: Master-AP, afsender, modtager
Master-AP: Det er skitsen til adgangspunktet. Åbn skitsen med arduino IDE. Indstil CPU -frekvensen til 160 MHz i værktøjsmenuen, og upload skitsen til ESP12.
Afsender: Det er skitsen til MSPNOW -afsenderen. Indstil CPU -frekvensen til 160 MHz, og upload den til en af ESP07.
Du kan se på det første billede, hvordan du tilslutter ESP8266 -modulet til blink.
Tilslut nu ESP12 (adgangspunkt) og afsenderens ESP07 serielle porte og strømforbindelser (andet billede): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Start begge moduler, og opret forbindelse til adgangspunktet "Long-Range-WifiPPM/MSP". Adgangskoden er "WifiPPM/MSP"
Åbn en browser, og åbn IP -adressen 192.168.4.1. Kontrolwebstedet vises. Klik på knappen "Wifi Info". En meddelelsesboks med afsenderens MAC og modtagerens MAC vises.
Åbn modtagerskitsen i Arduino IDE. Skift linjen "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (tredje billede) til afsenderens Mac -adresse, der vises på webstedet. Modtageren Mac skulle være ok. Sørg for, at CPU -frekvensen er indstillet til 160 MHz, og upload skitsen til den anden ESP05.
Trin 3: Tilslut modtageren til Flight Controller og Setup Cleanflight



Tilslut nu modtageren til flyvekontrolleren. Din flyvekontroller skal have en 3, 3 Volt udgang med mindst 200 mA. Hvis ikke har du brug for en ekstra 3, 3V spændingsregulator.
Tilslut ESD's GND til flyvekontrollens GND. Tilslut VCC på ESP til 3, 3V på flyvekontrollen eller til den ekstra 3, 3V spændingsregulator.
Du kan bruge PPM -output eller den serielle MSP -output.
Til MSP -udgang tilsluttes TX af ESP8266 til RX i enhver seriel port på din flyvekontroller. (Billede 1)
For PPM -udgang tilsluttes GPIO5 på ESP8266 til PPM -indgangen på flyvekontrolleren. (Billede 1)
Efter tilslutning af ESP startes flyvekontrolleren og åbner cleanflight. Tilslut din mobiltelefon til "WifiPPM/MSP" adgangspunktet. Adgangskoden er "WifiPPM/MSP"
Til MSP: Åbn fanen porte, og indstil MSP til den serielle port, du tilsluttede ESP8266 (billede 2). Gem og genstart. Gå til konfigurationsfanen, og indstil modtageren til "MSP seriel modtager" (billede 3). Gem og genstart.
For PPM: Læs i manualen til din flyvekontroller, hvordan du konfigurerer PPMGå til konfigurationsfanen og indstil modtageren til "PPM -modtager" (billede 4). Gem og genstart.
Den næste opsætning er for begge modtagere den samme: Gå til modtagerfanen. Indstil kanalerne til "RTAE1234" (billede 5/video). Gem opsætningen.
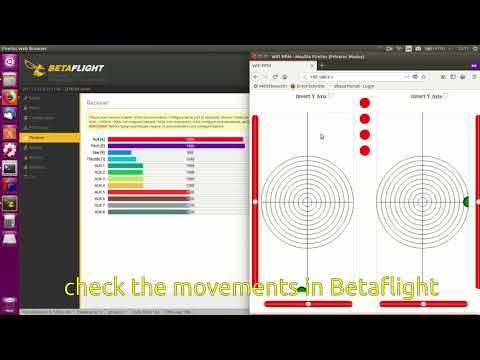
Åbn nu en browser på din smartphone. Åbn webstedet 192.168.4.1 (billede 6). Nu kan du kontrollere controlleren.
Hvis det virker, skal du starte de to afsendere ESP8266. Opret forbindelse til adgangspunktet "Long Range WifiPPM/MSP". Adgangskoden er "WifiPPM/MSP". Åbn webstedet igen 192.168.4.1. Tjek igen i cleanflight, hvis det virker.
Tilslut antennerne til ESP07 -modulerne.
Trin 4: Nogle flere oplysninger

Der er to adgangspunkter ved normal drift. Adgangspunktet "WifiPPM/MSP" er som det tidligere WifiPPM -projekt. Du kan bruge den, hvis du bare vil lave en hurtig flyvning uden at tilslutte yderligere moduler, når du ikke har brug for langdistanceforbindelse. Hvis du opretter forbindelse til "Long Range WifiPPM/MSP" tager langdistancecontrollen kontrol.
Måske vil du vide, hvor lang tid er "lang rækkevidde". Faktisk ved jeg det ikke rigtigt. Det er mindst et par hundrede meter. Men jeg kunne ikke teste det før nu. Det mister ikke forbindelsen i min komplette lejlighed.
Jeg tilføjede MSP -kontrol, fordi jeg troede, jeg kunne lave en bagkanal til telemetredata. Men det fungerede aldrig stabilt. Anyway, MSP -protokollen er mere præcis end ppm, fordi den ikke afhænger af timing så meget. Måske giver det problemer med langsomme flyvekontrollere, fordi der er tung trafik på den serielle port. Med min Noxe F4 flight controller fungerer det uden problemer.
Hvis du har konfigurationsproblemer, skal du kigge på det gamle WifiPPM -projekt.
Anbefalede:
IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature-Sensor: 7 trin

IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature Sensor: Vibration er virkelig en frem og tilbage bevægelse-eller svingning-af maskiner og komponenter i motoriserede gadgets. Vibration i det industrielle system kan være et symptom eller motiv af besvær, eller det kan være forbundet med daglig drift. For eksempel osci
Node-RØD Med IoT Long Range Vibration og temperatursensor: 34 trin

Node-RØD Med IoT Long Range Vibration og Temperatursensor: Introduktion til NCDs trådløse temperaturfugtighedsføler med lang rækkevidde med en rækkevidde på op til 28 Mile ved hjælp af en trådløs mesh-netværksarkitektur. Ved at inkorporere Honeywell HIH9130 temperaturfugtighedsføler sender meget nøjagtig temperatur og
IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: 6 trin

IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: I dette projekt måler vi vibrationer og temperatur ved hjælp af NCD-vibrationer og temperatursensorer, Esp32, ThingSpeak. Vibration er virkelig en frem og tilbage bevægelse-eller svingning - af maskiner og komponenter i motoriserede gadgets. Vibrationer i
Sender IoT Long Range trådløs temperatur- og luftfugtighedssensordata til Google Sheet: 39 trin

Sender IoT Long Range trådløs temperatur- og luftfugtighedssensordata til Google Sheet: Vi bruger her NCDs temperatur- og fugtighedsføler, men trinene er de samme for ethvert af ncd -produkterne, så hvis du har andre trådløse ncd -sensorer, er det gratis at observere ved siden af foruden. Ved at stoppe denne tekst skal du
Wifi PPM (ingen app påkrævet): 4 trin (med billeder)
: 4 trin (med billeder)")
Wifi PPM (ingen app påkrævet): Jeg ville styre min diy mikro indendørs quadrocopter med min smartphone, men jeg kunne ikke finde en god løsning til dette. Jeg havde et par ESP8266 wifi -moduler liggende, så jeg besluttede at lave mit eget. Programmet starter et wifi -adgangspunkt med en HTML