Indholdsfortegnelse:
- Trin 1: Påkrævede værktøjer og materialer
- Trin 2: Konstruktion af rammen
- Trin 3: Kabelføring af skjoldtråde til pladen og Arduino
- Trin 4: Ledningsføring af lysdioderne
- Trin 5: Kodning
- Trin 6: Brug af prototypen
")
Video: Tfcd 3D Motion Tracking Through Capacitive Sensing og LED Output: 6 trin (med billeder)
")
2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:29

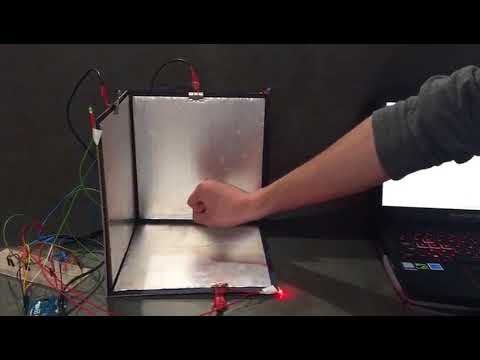

I denne instruktion forklares, hvordan bevægelse af en hånd kan spores i et 3D -rum ved hjælp af princippet om kapacitiv sansning. Ved at ændre afstanden mellem en ladet aluminiumsfolie og din hånd vil kondensatorens kapacitet variere. Denne metode kan bruges som et low-end alternativ til inertial- og optiske systemer til at spore bevægelse i 3D-rum. I denne prototype tilføjede vi LED'er, der lyser, når objektet bevæger sig for tæt på arket aluminiumsfolie.
Trin 1: Påkrævede værktøjer og materialer
- 3x 270k Ohm modstand
- 3x 10k Ohm modstand
- 3x Alligator -klip
- 1x rød LED
- 1x blå LED
- 1x grøn LED
- 3x 220 Ohm modstand
- Lodning
- Varme krympe
- Skærmkabel
- Arduino Uno
- Sølvpapir
- Pap
- Tape
- Sprøjt lim
- Brødbræt
- Tilslutningskabler (varierende længder)
Trin 2: Konstruktion af rammen




Skær tre firkantede stykker pap (250x250 mm) og tre firkantede stykker aluminiumsfolie (230x230 mm) ud. Påfør spraylim på den ene side af aluminiumsfolien og påfør hver på stykkerne pap. I denne prototype fungerer plader af aluminiumsfolie som vores kapacitive sensorer. Sørg derfor for, at der er nok plads mellem aluminiumsfolien og papkanten, så der ikke kommer kontakt mellem de forskellige folier, når rammen er samlet. Når folien er påført pap, er det tid til at samle de tre stykker pap ved hjælp af tape for at fuldføre rammen. Sørg igen for, at der ikke er kontakt mellem de forskellige plader af aluminiumsfolie.
Trin 3: Kabelføring af skjoldtråde til pladen og Arduino



Det er vigtigt at bruge et afskærmet kabel til at forbinde folierne med kredsløbet. Brug af normale kabler vil generere en antenneeffekt og forstyrre dine sensoraflæsninger. Sørg for at have 3 afskærmede kabler, der er omkring 50 cm lange. Tag et kabel, fjern ledningen, afskærmningstrådene og brug kun den indvendige ledning til at forbinde det ved at lodde tråden til krokodilleklemmen. Sørg for at anvende en varmekrymp for at dække loddetilslutningen. Klip krokodilleklemmerne til aluminiumsfolien.
Tilslut alle skjoldtrådene til den positive række af dit brødbræt. Tilslut derefter denne positive række til 5V -forbindelsen på din Arduino. Tag nu hovedledningen fra skærmkablet, og tilslut en 10k Ohm og 220k Ohm modstand parallelt. Tilslut dette til outputporten på din Arduino (vi brugte 8, 9 og 10).
Gentag dette trin yderligere 2 gange for de andre planer i prototypen.
Trin 4: Ledningsføring af lysdioderne




Lod lod enderne af lysdioder til lang ledning, så den kan nå hjørnerne af de respektive plader fra arduino -pladen.
Vi brugte ben 2, 3 og 4 som outputstifter til vores LED’er. Denne udgang er tilsluttet brødbrættet og forbundet til LEDens positive ben. LEDens negative ben er derefter forbundet til 330 Ohm modstanden. Den anden ende af modstanden er forbundet til brødbrættets jord, som er forbundet med jorden på Arduino. Gentag dette for alle 3 lysdioder. I vores prototype er den blå LED forbundet til Y-planet, den røde LED til Z-planet og den grønne LED til X-planet. Tape LED'erne til de tilsvarende fly for at få direkte feedback, når du bruger prototypen.
Hvis du ikke bruger et brødbræt, og du vil tilslutte skærmkablet direkte til Arduino, kan du se det vedhæftede billede for at få et godt overblik over loddetilslutningerne. Dine endelige forbindelser skal ligne oversigtsbilledet.
Trin 5: Kodning
I vedhæftet fil placerede vi den kode, vi brugte til dette eksperiment. For ekstra indsigt er der efter hver hovedkommando placeret en kommentar, der forklarer, hvad der sker i koden. Åbn koden i din Arduino -software på din pc, og upload den til din Arduino. Hvis du bruger en bærbar computer, skal du sørge for, at den oplades; ellers virker din prototype ikke.
Trin 6: Brug af prototypen
Denne måde til 3D -bevægelsessporing er meget følsom for omgivende variabler. Sørg derfor for at kalibrere værdierne i koden til din egen situation. Du kan simpelthen bruge den serielle skærm til at få de rigtige værdier. Tip: du kan selv indbygge en kalibrering, hvor det tager gennemsnitsværdierne + 10 %, når koden køres. I videoen er demonstreret, hvordan prototypen skal fungere korrekt.
Anbefalede:
Night Light Motion & Darkness Sensing - Ingen mikro: 7 trin (med billeder)
")
Night Light Motion & Darkness Sensing - No Micro: Denne instruktør handler om at forhindre dig i at stikke din tå, når du går gennem et mørkt rum. Du kan sige, at det er for din egen sikkerhed, hvis du står op om natten og forsøger at nå døren sikkert. Selvfølgelig kan du bruge en sengelampe eller hovedlampen
Motion Sensing Under Bed Lighting: 16 trin (med billeder)
")
Motion Sensing Under Bed Lighting: Har du nogensinde prøvet at komme ud af sengen stille om natten for kun at snuble over noget og vække hele huset? Bevægelsesfølende nattelys, der er diskret installeret under din seng, giver lavt lys, der er klart nok til at guide dig rundt i de vildfarne LEGO klodser
DIY Smart Robot Tracking Car Kits Tracking Car Fotosensitive: 7 trin

DIY Smart Robot Tracking Car Kits Tracking Car Fotofølsom: Design af SINONING ROBOT Du kan købe fra tracking robot carTheoryLM393 chip sammenligne de to fotoresistor, når der er en fotoresistor LED på den ene side på HVID, stopper motorens side med det samme, den anden side af motoren drej op, så
QeMotion - Motion Tracking for Every Headset !: 5 trin (med billeder)
")
QeMotion - Motion Tracking for Every Headset !: Oversigt: Denne enhed giver dig mulighed for at udnytte din hovedbevægelse til at udløse begivenheder i stort set ethvert videospil. Det fungerer ved at spore dit hoveds bevægelse (eller headset det i den forbindelse) og udløse tastatur-tryk for bestemte bevægelser. Så din komp
Full Wave Rectifier Circuit Through Bridge Rectification: 5 trin (med billeder)
")
Full Wave Rectifier Circuit Through Bridge Rectification: Rectification er processen med at konvertere en vekselstrøm til jævnstrøm