Indholdsfortegnelse:
- Trin 1: DWMM0 - HARDWAREBESKRIVELSE
- Trin 2: DWMMO - GNSS/GPS LOGGER -ANVENDELSE
- Trin 3: DWMM0 - GENERERING af KML -FIL

Video: DWMM0 mobiltilslutning mezzanin: 3 trin

2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:28



Dette er en simpel demonstration af brugen af DWMM0 -mezzaninen til fjerndatalogning. Klientsiden af denne applikation kører et python -script (client.py), der er ansvarlig for at læse GNSS/GPS -data og overføre dem til serversiden (via TCP/IP protokol), der kører et andet script (server.py) med ansvar for indsamling og lagring af indgående data.
Reference: projektwebsted
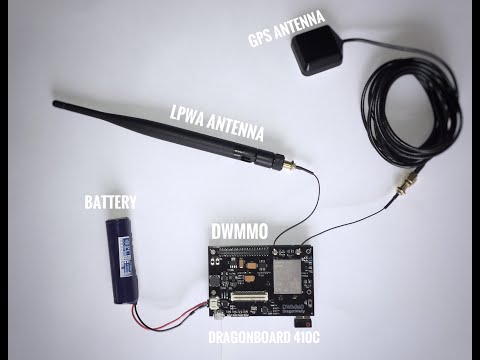
Trin 1: DWMM0 - HARDWAREBESKRIVELSE

DWMM0 Mezzanine er et ekstra tilbehørskort til DragonBoard 410c single board computer (eller enhver anden 96Boards standard SBC). Denne mezzanin består af 5 hovedsubsystemer:
- Li-Ion batterioplader
- USB 2.0 -hubkontroller
- DC/DC Boost Converter (fra 3.0V til 9.0V)
- LPWA/GNSS -modul (med en Quectel BG96 -enhed)
- DC/DC -omformere (fra 5V til 3.3V og 4.1V)
Trin 2: DWMMO - GNSS/GPS LOGGER -ANVENDELSE
De originale python -scripts til denne applikation kan downloades herfra: download scripts Server.py scriptet skal køre på enhver computer med internetforbindelse (SERVER side). Client.py script mist kører på en DragonBoard 410c med DWMM0 Mezzanine (CLIENT side Hvert script har sin egen "konfigurerbare parametre" -session, der skal justeres af brugeren (f.eks. TCP/IP -adresse, porte, netværks -APN, brugernavn og adgangskode).
Trin 3: DWMM0 - GENERERING af KML -FIL
Filen updated_python_scripts.zip indeholder et modificeret klientscript (gpslog.py), der implementerer lokal lagring af GPS -data (NMEA -data fra Quectel BG96 -modulet):
- gpslog.py: opdateret klient script (gemmer GPS data i fil logger.txt)
- makekml.py: konverterer logger.txt -filen til en KML -version (logger.kml), der kan åbnes i Google Earth
- logger.txt: gemte GPS -data
- logger.kml: KML -konvertering af de gemte GPS -data
Anbefalede:
Arduino bil omvendt parkering alarmsystem - Trin for trin: 4 trin

Arduino bil omvendt parkering alarmsystem. Trin for trin: I dette projekt vil jeg designe en simpel Arduino bil omvendt parkeringssensorkreds ved hjælp af Arduino UNO og HC-SR04 ultralydssensor. Dette Arduino -baserede bilomvendt alarmsystem kan bruges til en autonom navigation, robotafstand og andre rækkevidde
Trin for trin pc -bygning: 9 trin

Trin for trin PC Building: Supplies: Hardware: MotherboardCPU & CPU -køler PSU (strømforsyningsenhed) Opbevaring (HDD/SSD) RAMGPU (ikke påkrævet) CaseTools: Skruetrækker ESD -armbånd/mathermal pasta m/applikator
Tre højttalerkredsløb -- Trin-for-trin vejledning: 3 trin

Tre højttalerkredsløb || Trin-for-trin vejledning: Højttalerkredsløb styrker lydsignalerne, der modtages fra miljøet til MIC og sender det til højttaleren, hvorfra forstærket lyd produceres. Her vil jeg vise dig tre forskellige måder at lave dette højttalerkredsløb på:
Trin-for-trin uddannelse i robotik med et sæt: 6 trin

Trin-for-trin uddannelse i robotteknologi med et kit: Efter ganske få måneder med at bygge min egen robot (se alle disse), og efter at jeg to gange havde dele mislykkedes, besluttede jeg at tage et skridt tilbage og tænke min strategi og retning. De flere måneders erfaring var til tider meget givende, og
Akustisk levitation med Arduino Uno trin for trin (8 trin): 8 trin
: 8 trin")
Akustisk levitation med Arduino Uno Step-by Step (8-trin): ultralyds lydtransducere L298N Dc kvindelig adapter strømforsyning med en han-DC-pin Arduino UNOBreadboard Sådan fungerer det: Først uploader du kode til Arduino Uno (det er en mikrokontroller udstyret med digital og analoge porte til konvertering af kode (C ++)