Indholdsfortegnelse:
- Trin 1: Materialer til projektet
- Trin 2: Del 1: Oprettelse af Liner Motion for Writer
- Trin 3: Del 2: Writer Head (op og ned bevægelse)
- Trin 4: Del 3: Papirrulle
- Trin 5: Del 4: Integration af Bluetooth -modul
- Trin 6: Del 5: Saml alle
- Trin 7: Gør kredsløbet kompakt
- Trin 8: Lad udskrive punktskrift
: 8 trin (med billeder)")
Video: Simple Braille Writer (tale til punktskrift): 8 trin (med billeder)
: 8 trin (med billeder)")
2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:29


Hej allesammen, Alt dette startede med at lave en simpel XY -plotter efter at have gennemført den med succes, jeg tænkte på at udvikle en enkel tale til braille tekstkonverter. Jeg begyndte at søge på den online og uventet var priserne for høje, hvilket fik mig til at bygge en lille bærbar og billig forfatter.
Da vi ved, at uanset hvad vi synes om at bygge, kan det eksistere eller i det mindste være forsøgt af nogen, så jeg begyndte at lede efter en sådan skrivemaskine. Jeg fik en video, hvor den var ret stor og støjende, så jeg tænkte at sætte min egen smag som er lille bærbar og let at bruge.
Ærligt talt er jeg ny på Arduino og er stadig ved at lære det. Jeg var i stand til at bygge en XY -plotter, så mit håb var højt med den samme viden, jeg kunne trække min egen lille brailleskribent ud. Så i denne proces har jeg lært meget, og jeg kunne endelig udvikle det på bare 2 uger.
Så her går det, hvordan man bygger en simpel brailleforfatter.
Trin 1: Materialer til projektet
- Arduino Nano
- A4988 Stepper driver
- Bluetooth serielt transceiver -modul
- CD -drev stepper motor skyder lineær guide mikro
- 2-delt 360-graders servomotor med rotation
- 1 stykke 180-graders servomotor
- 2 stk. Injektionssprøjte (i lægebutikken)
- 1 stykke klart akrylark
- Dobbeltsidet skumbånd
- Fevi Kwik
- Mand-Kvinde jumper wire
- Skæreværktøj og skruetrækkersæt.
- Gel / kuglepen
- Mobiltelefon med Bluetooth -funktion
- APP: Arduino Voice Control
Lad os nu bygge det
-
Det samlede projekt kan opdeles i 4 små dele
- Linjemodulopsætning (ved hjælp af A4988 -driver)
- Oprettelse af bevægelse op og ned for forfatterens hoved
- Rulle til papirrulle
- Bluetooth -integration
- I slutningen skal du samle alle de dele, der vil føre til at fuldføre projektet.
Trin 2: Del 1: Oprettelse af Liner Motion for Writer

Vi skal frem og tilbage bevægelse for at skrive tingene i papiret. Der er masser af videoer derude til at skabe sådan mekanisk bevægelse ved hjælp af forskellige metoder. Men ved at bruge trinmotor kan vi gøre det meget let med høj nøjagtighed.
Så for at undgå mekanisk oprettelse brugte jeg stepper motor, der følger med en skyder, du kan bygge den din egen, hvis du er interesseret i at bygge din egen, kan du følge dette link.
Når den mekaniske del er færdig, skal vi følge trinene for at udføre den elektriske konfiguration
- Følg billedet, gør kredsløbskonfigurationen.
-
Sørg for at sætte
- Pin 6: Aktiver
- Pin 5: Trin
- Pin 4: Retning
- Upload koden for basicMove2 i din Arduino nano, åbn den serielle skærm, og brug "f" til at videresende og "" b "baglæns, og test dit kredsløb. Tjek, om du er i stand til at opnå korrekt lineær bevægelse eller ikke med nøjagtighed.
- Du kan også bruge serier af fbfbffbbfffbbb som kommando.
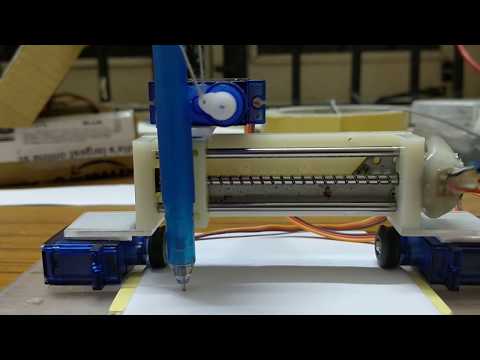
Trin 3: Del 2: Writer Head (op og ned bevægelse)
")
")
")
")
Der er forskellige måder at gøre op og ned bevægelse. Du kan gøre det ved at bruge en magnetventil. Men her bruger jeg en simpel pen til det ved hjælp af en servomotor.
- Tag enhver enkel kuglepen med en aftagelig påfyldning.
- Opret et hul i toppen efter at have skubbet påfyldningen indeni, sørg for at dit hul skal gå gennem begge sider af pennen og genopfyld.
- Opret endnu et hul i påfyldningen, og fastgør en snor til den.
- Sæt refill tilbage, og opret et hul i pen under refilehullet, sørg for at gøre det mindst 2-3 cm lavere end refilen.
- Bind nu en elastisk gummi ovenpå gennem pen og genopfyld.
- Brug 180 graders servomotor, og sæt den til 0 grader, og fastgør snoren til nob.
- Når noben nu roterer mod uret 180, vil genopfyldningen blive trukket ud, og når den bevæger sig tilbage til 0 grader på grund af elastikbåndet på toppen, flytter den tilbage indeni.
- Sæt signalpinden på pin nummer 8 i Arduino nano.
- Upload koden for basicMove2 i din Arduino nano, åbn den serielle skærm, og brug "n" og test dit kredsløb.
- Du kan også bruge en række nnnnnnnnn -kommandoer og kontrollere, om den fungerer eller ej.
- Forøg fald rotationsvinkel for at få lystbevægelse.
Trin 4: Del 3: Papirrulle



Nu papirrullen, det er den mest interessante og udfordrende del.
- Fjern injektionssprøjtens gummi.
- Skær plastgearet til cirkel.
- Kom det i gummiet og påfør lidt lim.
- Fastgør servoen og fastgør den med lim.
- Opret en anden som ovenfor.
- Sæt signalpinden på pin nummer 9 og 10 i Arduino nano.
- Upload koden for basicMove2 i din Arduino nano, og åbn den serielle skærm, og brug "p" og test dit kredsløb.
- Du kan også bruge en række pppppppppp -kommandoer og kontrollere, om den fungerer eller ej.
- Forøg fald rotationsvinkel for at få den ønskede hastighed.
- Prøv at justere hastigheden ved at ændre potentiometeret, der er til stede inde i servoen.
- Lav rotationen i samme retning og hastighed (dette er det vigtigste og kedelige arbejde).
Trin 5: Del 4: Integration af Bluetooth -modul

Denne del er den letteste del.
- Gør ovenstående kredsløbskonfiguration, og det er gjort.
- Det hjælper dig med at sende stemmekommando ved hjælp af Arduino Voice Control.
- Du kan søge efter "Arduino Bluetooth-modul hc-05" i google, du får fede eksempler.
Trin 6: Del 5: Saml alle



Lad os nu samle alle vores fire dele.
- Rengør arket.
- Brug dobbeltbånd til at tilføje servomotor som vist på figuren.
- Sæt ekstra plaststykke på den lineære skyder og læg det oven på to servoer.
- Sørg for at placere den parallelt med papirrullen.
- Sæt nu penhovedet på, sørg for at det ikke skal røre overfladen, og ved servodrejning skal det slå et hul på tapen.
- Fastgør stiften Arduino nano.
- Upload koden for basicMove2 i din Arduino nano.
-
Åbn den serielle skærm, og kontroller alle kommandoerne
- f til videresendelse
- b for ryg
- p til papirrulning
- n for at flytte pen til op og ned.
- Når alle funktionerne er bekræftet nu, er den klar til udskrivning af punktskrift.
Trin 7: Gør kredsløbet kompakt




Flow billedet for at lave kredsløbet i et lille og enkelt brødbræt.
Trin 8: Lad udskrive punktskrift

- Åbn Brallie.ino -filen, åbn den serielle skærm for Arduino IDE.
- Læg papiret under rullende papirmotor.
- Send noget mellemrum, dvs. ("") i kommandoen, og klik på enter.
- Papiret glider indeni.
- Gør det, indtil det krydser forfatterens hoved.
- Derefter kan du sende din kommando i skærmen, den faktiske tekst.
- Åbn din Bluetooth -app, og opret forbindelse til Bluetooth, og send stemmekommando.
- vend papiret for at se punktskriftssproget.
- Jeg prøvede få ord som hej, hej og velkommen, du kan se prøveudgangspapiret.
-
Du kan ændre nedenstående parametre i koden for at få de specifikke resultater for dig.
- Gap mellem punktskriftssøjler: int -trin = 30;
- Linjeafstand mellem punktskrift to første prikker til næste to prikker rækker: int paperLine = 250;
- Hastighed på lineær skyder: int stepperDelay = 500;
- Hastighed på forfatterhoved: int servodelay = 500;
- Antal tegn pr. Linje: int n = 10;
Anbefalede:
Gest til tale/tekstkonverterende handske: 5 trin

Gesture to Speech/Text Converting Glove: Ideen/skubbet bag implementeringen af dette projekt var at hjælpe mennesker, der har svært ved at kommunikere ved hjælp af tale og kommunikere ved hjælp af håndbevægelser eller mere populært kendt som amerikansk tegnsprog (ASL). Dette projekt kan være et skridt i retning af
Tekst til punktskrift og lyd: 7 trin

Tekst til punktskrift og lyd: Dette projekt blev oprettet af mig og min ven Akiva Brookler som et skoleprojekt for vores ingeniørklasse. Ideen bag var at skabe en måde for blinde, der kun kan læse i punktskrift, for at kunne læse tekst sendt til deres computer. I dag
Coke Machine Level Detector - Nu Med Tale !: 6 trin (med billeder)
")
Coke Machine Level Detector-Now With Speech !: Dette projekt er et remix af min Coke Machine Can Level detector, (https://www.instructables.com/id/Coke-Machine-Can-Level-Detector/) med nye sensorer , og tilføjelse af talt lyd! Efter at jeg havde lavet min første niveau detektor, tilføjede jeg en piezo -summer til g
Bubble Talk: Gør din tale til bobler !: 6 trin (med billeder)
")
Bubble Talk: Vend din tale til bobler !:”quod, ut dicitur, si est homo bulla, eo magis senex (for hvis, som man siger, mennesket er en boble, desto mere er en gammel mand)” - Marcus Terentius Varro (116 f.Kr. - 27 f.Kr.), De Re Rustica En sæbeboble er flygtig. Det varer kun et kort øjeblik og hviler
Arduino TTS (tekst til tale): 3 trin (med billeder)
: 3 trin (med billeder)")
Arduino TTS (tekst til tale): Hej fyre i dag i denne vejledning vil jeg lære dig, hvordan du får din Arduino til at tale uden noget eksternt modul. Her kan vi bruge dette i talrige projekter som tale termometer, robotter og mange flere. Så lad os starte med dette projekt uden meget spildtid