Indholdsfortegnelse:
- Trin 1: Installer VPython og Editor
- Trin 2: Download koden og kør
- Trin 3: Udvikl dine handlinger i denne simulator
- Trin 4: Fjernbetjening til Real Spider Robot
![[vPython] Spider Robot Simulator: 4 trin](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Spider Robot Simulator: 4 trin")
Video: [vPython] Spider Robot Simulator: 4 trin
![Video: [vPython] Spider Robot Simulator: 4 trin](https://i.ytimg.com/vi/FqS1nOtGfOY/hqdefault.jpg "Video: [vPython] Spider Robot Simulator: 4 trin")
2024 Forfatter: John Day | [email protected]. Sidst ændret: 2024-01-30 08:29


Hvis du finder mit design interessant, kan du give en lille donation:
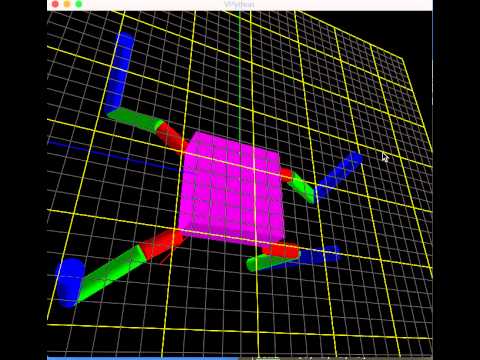
Jeg bruger vPython til at simulere handlingerne for min Spider -robot. Det er let at udvikle dine egne interesseaktioner i pc/mac og derefter overføre til arduino.
Der er den rigtige robot instruerbar, hvis du er interesseret i det
www.instructables.com/id/DIY-Spider-RobotQu…
VPython er Python -programmeringssproget plus et 3D -grafikmodul kaldet "visual", der stammer fra David Scherer i 2000. VPython gør det let at oprette navigerbare 3D -skærme og animationer, selv for dem med begrænset programmeringserfaring. Fordi det er baseret på Python, har det også meget at tilbyde for erfarne programmører og forskere.
Trin 1: Installer VPython og Editor


installer python , Jeg foreslår at bruge 2.7.x
www.python.org/
og derefter vpython
vpython.org/
og, min yndlingsredaktør - PyCharm
www.jetbrains.com/pycharm/
Trin 2: Download koden og kør

Download koden, og åbn den med PyCharm, kør koden, og du vil se en smuk 3D edderkoprobot på skærmen, og du kan bruge musen med den midterste knap til at zoome ind/ud, den højre knap til at rotere.
Trin 3: Udvikl dine handlinger i denne simulator
Det vil være sjovt, hvis du kan udvikle mere interessante handlinger og dele med mig.
Trin 4: Fjernbetjening til Real Spider Robot
Hvad med at styre den rigtige robot ved hjælp af python -tanke bluetooth? Du vil måske allerede prøve det. Jeg sender det senere, hvis nogen har brug for det.
Anbefalede:
"Miles" Quadruped Spider Robot: 5 trin

"Miles" Quadruped Spider Robot: Baseret på Arduino Nano er Miles en edderkopprobot, der bruger sine 4 ben til at gå og manøvrere. Den bruger 8 SG90 / MG90 Servomotorer som aktuatorer til benene, består af et brugerdefineret printkort til at drive og styre servoerne og Arduino Nano.PCB har dedikeret
Quadruped Spider Robot - GC_MK1: 8 trin (med billeder)
")
Quadruped Spider Robot - GC_MK1: Edderkoprobotten alias GC_MK1 bevæger sig frem og tilbage og kan også danse afhængigt af koden indlæst på Arduino. Robotten bruger 12 mikro servomotorer (SG90); 3 for hvert ben. Controlleren, der bruges til at styre servomotorer, er en Arduino Nan
Sådan tilsluttes FlySky -sender til enhver pc -simulator (ClearView RC Simulator) -- Uden kabel: 6 trin
 -- Uden kabel: 6 trin")
Sådan tilsluttes FlySky -sender til enhver pc -simulator (ClearView RC Simulator) || Uden kabel: Guide til at forbinde FlySky I6 med en computer for at simulere flyvning for begyndere af vingefly. Flysimuleringsforbindelse ved hjælp af Flysky I6 og Arduino kræver ikke brug af simuleringskabler
[DIY] Spider Robot (Quad Robot, Quadruped): 14 trin (med billeder)
![[DIY] Spider Robot (Quad Robot, Quadruped): 14 trin (med billeder)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Spider Robot (Quad Robot, Quadruped): 14 trin (med billeder)")
[DIY] Spider Robot (Quad Robot, Quadruped): Hvis du har brug for ekstra støtte fra mig, vil det være bedre at give en passende donation til mig: http: //paypal.me/RegisHsu2019-10-10 opdatering: Den nye kompilator vil medføre problem med beregning af flydende tal. Jeg har allerede ændret koden. 2017-03-26
ARDUINO SPIDER ROBOT (QUADRUPED): 7 trin
: 7 trin")
ARDUINO SPIDER ROBOT (QUADRUPED): Hej fyre! Her er en ny vejledning til at guide dig trin for trin, mens du laver denne form for super fantastiske elektroniske projekter, som er " Crawler -robotten " også kendt som " Spider Robot " du er en "Quadruped robot". Da hver krop ikke